行为配置树¶
Summary¶
以往的任务系统或者行为树等总体事件配置大多是使用ScriptableObject进行存储。但SO的方式存储并不好进行大批量的配置和调整,而很多任务采用了任务系统去一个监听的方式再去播放广播的一个方式,并且将图状结构直接关系树表示并不能做到离散化。所以笔者写了一个小工具,用于离散配置图状行为,并且序列化的字符串可以导入到Excel中。
Github仓库¶
概览¶
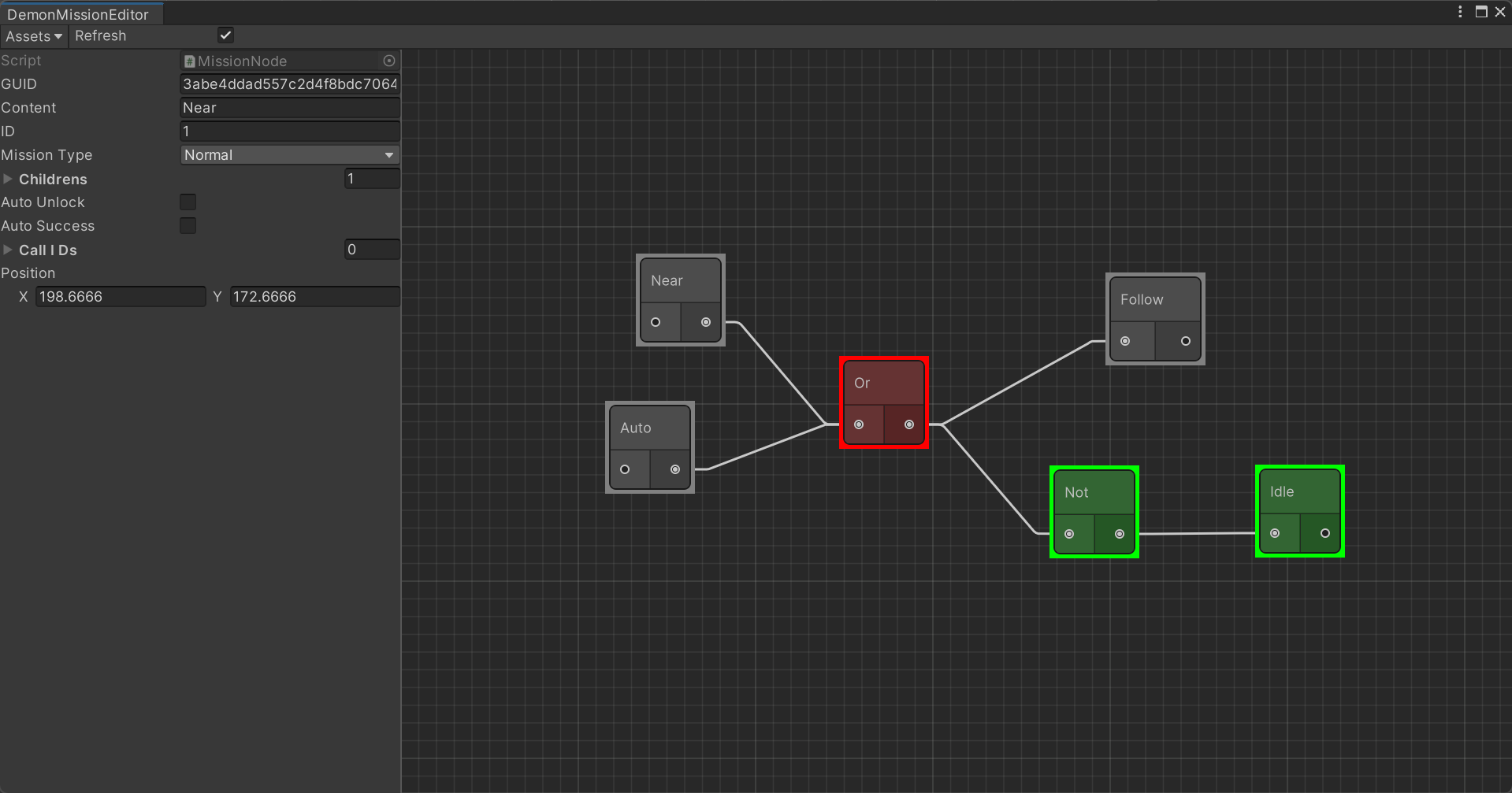
- 如图,左边为
Inspector窗口,用于观察具体的Node的数据,右边则为图状的节点蓝图。 -
节点的具体颜色则表示该节点的判断状态。如下表所示: | | | |:-:|:-:| |绿色|执行成功| |红色|执行失败| |黄色|正在执行| |灰色|节点未解锁| |白色|节点隐藏|
-
上图的简单行为配置可以通过直观的方式分析:当处于
靠近状态或者自动跟随状态时,进行跟随。否则,静置。 -
蓝图的序列化文本数据如下
-
上述蓝图的代码调用